Raspberry Pi Pico入門|違い・選び方・始め方
Raspberry Pi Pico入門|違い・選び方・始め方
Raspberry Pi PicoはRaspberry Piという名前でも、Linuxを動かす小さなパソコンではなく、電子工作向けの“マイコン”です。筆者のワークショップでも「PicoにRaspberry Pi OSを入れるには?」という質問が毎回のように出ますが、ここを最初に腹落ちさせるだけで、
Raspberry Pi PicoはRaspberry Piという名前でも、Linuxを動かす小さなパソコンではなく、電子工作向けの“マイコン”です。
筆者のワークショップでも「PicoにRaspberry Pi OSを入れるには?」という質問が毎回のように出ますが、ここを最初に腹落ちさせるだけで、その先の理解が一気につながります。
この記事では、RP2040の133 MHzや264 KB RAM、PIOといった基本スペックを数字でつかみつつ、PicoPico HPico WPico WHPico 2の違いを整理して、LED、センサー、モーター、IoTのどれから始めるべきかまで道筋をつけます。
BOOTSELからRPI-RP2へ接続し、UF2を書き込んでMicroPythonやC/C++、Arduino IDEで動かす流れも、初回で迷わない順番で追っていきます。
筆者のワークショップ経験に基づく目安として、初回のUF2ダウンロードやIDE・ドライバ設定などの準備を含めても、はじめての参加者がLチカまで到達するのは概ね5〜10分程度になることが多いです。
なお、UF2ファイルの実際の転送自体は数秒〜十数秒で完了することが一般的です。
Raspberry Pi Picoとは?普通のラズパイとの違い

ラズパイ(SBC)とPico(MCU)の主な違い
Raspberry Pi Picoは、Raspberry Pi 4やRaspberry Pi 5のようなLinux系のシングルボードコンピュータではなく、マイクロコントローラーボードです。
ここがポイントで、搭載しているのはRP2040というマイコンで、デュアルコアのArm Cortex-M0+、最大133 MHz、264 KB RAM、2 MBフラッシュという構成です。
ボード上には26 GPIO、外部から扱いやすい3 ADC、そしてRP2040の個性でもあるPIOを備えています。
この違いをつかむには、「小さなパソコン」と「電子回路を直接動かす制御基板」を分けて考えると腑に落ちます。
| 観点 | 普通のRaspberry Pi(SBC) | Raspberry Pi Pico(MCU) |
|---|---|---|
| 動くもの | Linux、たとえばRaspberry Pi OS | 内蔵フラッシュに書いた単体プログラム |
| 起動の流れ | OSが起動してからアプリを動かす | 電源投入直後にプログラムが動く |
| 画面まわり | HDMIでモニター接続が前提になることが多い | HDMIなし |
| ストレージ | microSDカードを使う | microSDスロットなし、2 MBフラッシュを使用 |
| USBの立ち位置 | キーボードやマウスをつなぐUSBホスト用途が中心 | PCへ書き込み・通信するUSBデバイス用途が中心 |
| 得意分野 | デスクトップ、サーバー、Web、画像処理 | LED、センサー、モーター、タイミング制御 |
講習では「モニターやキーボードはどこに挿しますか?」とよく聞かれます。
名前にRaspberry Piが入っているので自然な疑問ですが、PicoはPC周辺機器を直結して使う前提のボードではありません。
USBでPCにつないでプログラムを書き込み、その後は単体で動かす、という流れが基本です。
💡 Tip
Picoを「Linuxマシンの小型版」と考えると混乱します。実際の感覚は、「USBで書き込む電子工作用の頭脳」に近いです。
入出力の考え方も大きく異なります。
普通のラズパイではOSの上からGPIOを触りますが、PicoではGPIOをより直接的に扱います。
ボタン入力を読んでLEDを点灯したり、センサー値を読んでモーターを回したりといった処理が、電源投入後すぐに始まります。
通信もI2CSPIUARTが標準的に使え、温湿度センサー、OLED表示器、加速度センサー、モータードライバなどを組み合わせる世界に向いています。
Picoでできることの方向性
Picoで得意なのは、「決まった処理をすばやく安定して繰り返す」仕事です。
たとえばLEDの点滅、サーボやDCモーターの制御、スイッチ入力の監視、センサーの周期読み取り、簡単なロガー、工作物の状態監視といった用途では、Linux機よりもむしろ話が早い場面が多くあります。
OSの起動待ちがなく、書いたプログラムがそのまま動作の中心になるからです。
スペックだけ見ると、133 MHz、264 KB RAM、2 MBフラッシュはPCと比べて小さく見えるかもしれません。
ただ、この規模だからこそ電源投入直後から素直に制御へ入れます。
電子工作の入口でまず触る「LEDを光らせる」「距離センサーの値でブザーを鳴らす」「一定周期でリレーを切り替える」といった題材には、ちょうどよいバランスです。
PIOもPicoを特徴づける要素です。
RP2040には2つのPIOブロックがあり、各4ステートマシン、合計8ステートマシンを持ちます。
これは、CPU本体とは別に、正確なタイミングが要る信号処理を任せられる仕組みです。
筆者はワークショップでLEDテープや独特な通信タイミングを扱うとき、このPIOのありがたさをよく実感します。
CPUが別の処理をしていても、波形生成やシリアル風のやり取りを崩しにくいので、「マイコンでここまでできるのか」という驚きにつながります。
一方で、できることの方向は普通のラズパイとは違います。
ブラウザを開く、画面付きで複数アプリを並べる、Dockerを動かす、動画を再生するといった仕事はPicoの担当ではありません。
Picoは、電子部品とつながって現実世界を読む・動かす側に寄っています。
言い換えると、Webサーバーよりも配線図、ウィンドウ操作よりもGPIO番号のほうが主役になるボードです。
開発面ではMicroPythonとC/C++が定番で、Arduino系の環境から扱うこともできます。
入門ではMicroPythonが入りやすく、制御の追い込みや細かな最適化ではC/C++が強い、という住み分けが見えやすいボードでもあります。
電源と接続の基本
電源の基礎も、普通のラズパイと同じ感覚では見ないほうが整理しやすくなります。
Raspberry Pi Pico公式製品ページ(https://www.raspberrypi.com/products/raspberry-pi-pico/にある通り、Picoは入力電圧1.8〜5.5Vに対応しており、実際にはUSBからの5V給電で使い始める場面がもっとも多くなります。
PCにつないでそのまま動かし、プログラムの書き込みも同じUSB経由で済ませる、という流れです)。
この「USBでつなぐ」は、普通のラズパイのように周辺機器をぶら下げる意味ではありません。
Picoでは、PCが開発側、ボードが書き込まれる側になります。
最初の接続でつまずく人の多くは、ここを逆に想像しています。
モニターを映すためのケーブルではなく、プログラムを送り込むためのケーブル、と考えると役割が見えてきます。
GPIOまわりでは、電源線と信号線がそのまま電子部品につながるので、電圧の見方も実践寄りです。
I2CSPIUARTでセンサーや表示器をつなぎ、アナログ系は3 ADCで受ける、という構成が基本になります。
PicoはGPIOを多く持つので、LED数個とセンサー、ボタン、ブザーを同時に扱う程度なら構成を組みやすく、入門用の教材でも回路の自由度が高めです。
電源投入直後に内蔵フラッシュ上のプログラムが起動する、という性格は、装置っぽい使い方と相性が合います。
机の上の実験装置、温度や照度を読む小さな計測器、ボタン操作で反応する工作物などでは、OSの起動完了を待たずに動き始めることがそのまま扱いやすさにつながります。
ここでもPicoは「小型PC」ではなく、「電子工作の制御基板」として見るほうが実態に合っています。
マイコンとして見たRaspberry Pi Picoの基本スペック
RP2040の要点
Raspberry Pi Picoをマイコンボードとして見るとき、中心になるのは搭載チップの RP2040 です。
CPUは デュアルコア Arm Cortex-M0+ で、動作周波数は 最大133 MHz。
さらに 264 KB RAM をオンチップで持っています。
ここだけ数字で押さえると、「Linuxを動かす小型PC」ではなく、「決まった処理をすばやく繰り返す制御向けのマイコン」だとイメージしやすくなります。
133 MHzという数字だけ見ると控えめに感じるかもしれませんが、センサーの読み取り、LED制御、表示器の更新、サーボ制御のような電子工作の定番なら十分に守備範囲に入ります。
ワークショップでPicoを扱うと、複数のLEDをPWMで明るさ調整しながらサーボを動かす課題でも、構成が破綻しにくいのが印象に残ります。
PWMチャネルが豊富なので、サーボやLEDの多点制御を1枚でまとめやすく、それが教材として話を進めやすい理由にもなっています。
RP2040の特徴として外せないのが PIO です。
これは「高速・正確なI/O処理をCPUから切り離せる仕組み」と考えるとつかみやすいのが利点です。
普通のGPIO制御ではCPUがタイミングを見ながら信号を出しますが、PIOを使うとその部分を専用の小さな実行機構に任せられます。
メモリまわりでは、RP2040自体が外部 QSPIフラッシュ最大16 MB をサポートしている点も覚えておくと見通しがよくなります。
Picoボードとしての標準搭載量は後述の通りですが、チップの素性としてはもう少し広い拡張幅を持っている、ということですね。
PicoボードのI/Oと電源仕様
初代Raspberry Pi Picoのボード仕様として把握しておきたい数字は、2 MBフラッシュ、26 GPIO、3 ADC です。
GPIOはデジタル入出力全般に使え、LED、ボタン、リレー、モータードライバ、各種センサーとの接続で出番が多い部分です。
アナログ入力については表現がぶれやすいところですが、Picoボードとして外部から扱いやすいのは 3本 と整理しておくと混乱がありません。
可変抵抗やアナログ出力センサーの読み取りでは、この3本を使う場面が中心になります。
通信インターフェースも実用的で、I2C/SPI/UART を備えています。
たとえば、I2CでBME280、SPIで小型LCD、UARTでGPSをつなぐ、といった構成が組めます。
ここが揃っているので、入門段階の「光る」「測る」から、表示や通信を足した一歩先の工作まで流れが切れません。
実際、ブレッドボード上で部品を入れ替えながら試すときも、I2C/SPI/UARTの定番がひと通り使えるだけで選べるモジュールが一気に増えます。
保存領域はボード上に 2 MBフラッシュ を搭載しています。
MicroPythonのスクリプトやC/C++で作ったファームウェアを置くには、入門から中規模の作品まで十分に現実的な容量です。
ロガーやメニュー付きの小型機器を作るときでも、テキスト主体の設定や比較的軽いアプリなら収まりやすい部類です。
電源面では、ボードの 入力電圧1.8〜5.5V というレンジがPicoの扱いやすさにつながっています。
USB給電の5Vで素直に動かせるだけでなく、電池駆動の小型工作にも展開しやすい数字です。
Raspberry Pi Picoシリーズ公式ドキュメント。
Pico 2で増えたもの
Pico 2は、初代Picoの延長線上で考えると理解しやすいボードです。
搭載チップは RP2350 に変わり、メモリまわりがまず分かりやすく増えています。
SRAM 520 KB、フラッシュ 4 MB となり、初代の 264 KB RAM と 2 MBフラッシュ から余裕が広がりました。
この差は、数字だけでなく作れるものの幅にも表れます。
表示まわりのバッファを多く使う処理、通信とUIを同時に抱える処理、ライブラリをいくつか積み上げる構成では、RAMとフラッシュの余白がそのまま安心感になります。
初代Picoでも十分に学べますが、機能を足していく途中でメモリ残量を気にする場面は出てきます。
Pico 2はその壁を少し先へ押し出してくれる立ち位置です。
Raspberry Pi Picoで何ができる?向いている用途・向かない用途
できることリスト
Raspberry Pi Picoでできることをつかむには、まずボードの素性を用途に結びつけると見通しが立ちます。
初代PicoはRP2040を載せ、133 MHzで動くマイコンです。
メモリは264 KB RAM、保存領域は2 MBフラッシュ、入出力は26 GPIO、アナログ入力は3 ADCを備えています。
通信ではI2C/SPI/UARTが使え、独特なのがPIOです。
ここがあるおかげで、単なる「小さい制御板」では終わらず、タイミングに厳しい信号も扱える範囲に入ってきます。
入門で最も定番なのは、やはりLED点滅、いわゆるLチカです。
GPIOを1本使うだけで始められ、電源投入後すぐに反応が返ってくるので、「プログラムで物が動いた」という感覚を最短でつかめます。
その次に自然につながるのがボタン入力です。
押したらLEDが点く、離したら消える、といった構成で、デジタル入力と出力の基本が一度に見えてきます。
センサー読み取りもPicoの守備範囲です。
I2CでBME280のような環境センサー、SPIで表示器や高速な周辺機器、UARTでGPSやシリアル機器、ADCで可変抵抗やアナログ出力センサーをつなぐ、といった形が組めます。
ここが判断材料になります。
PicoはGPIOの本数に余裕があり、通信方式も基本どころが揃っているので、温度を読む、値を画面に出す、しきい値でブザーを鳴らす、といった小さな装置を一枚でまとめやすい構成です。
出力側ではPWMを使った制御が実用的です。
LEDの明るさを滑らかに変える調光、サーボモーターの角度制御、モータードライバを挟んだDCモーター制御などは、Picoらしい題材です。
筆者の経験でも、電池給電の小物制御はPicoの得意分野です。
タイマーやPWMだけでシンプルに動かす構成にすると、動作時間や消費の感触をつかみやすく、机の上の実験から作品づくりへつなげやすくなります。
電源入力が1.8〜5.5Vなので、USB給電だけでなく小型の電池系と組み合わせた工作にも収まりがよいわけです。
PIOが効く場面も見逃せません。
たとえばNeoPixelのようにタイミング条件が厳しいLED制御では、CPUに細かい波形生成を押しつけずに済みます。
『MicroPython PIOチュートリアル』で紹介されている通り、RP2040のPIOは独立したI/O処理の考え方を学ぶ題材としても面白いです。
普通のGPIO制御から一段進んだ工作に橋をかけてくれます。
ネットワーク系まで広げたいなら、Pico WやPico WHが候補に入ります。
Wi‑Fiに加えてBLEも使えるので、HTTPでセンサー値を送る、簡単なWeb APIをたたく、スマホとBLEでやり取りするといったIoT入門に向きます。
Raspberry Pi Pico公式製品ページでもPico系の用途として組み込み制御や無線活用が整理されていて、Linuxマシンの代わりではなく、単機能の機器を作るボードとして位置づけると理解しやすくなります。
ℹ️ Note
低消費電力もPicoの魅力ですが、ここは数字を断定せず「目安」で見るのが実務的です。RP2040には深いスリープ相当で180μA程度という情報がありますが、周辺回路や起こし方まで含めて設計したときの話になるので、電池工作では「何をつなぐか」で感触が変わります。
プログラマブル IO — MicroPython latest ドキュメント
micropython-docs-ja.readthedocs.io不得意・不向きの領域
Picoが苦手な領域も、先に切り分けておくと迷いません。
いちばん分かりやすいのは、デスクトップ用途です。
画面をつないでブラウザを開く、アプリを複数立ち上げる、ファイルを並べて作業するといった使い方は、普通のRaspberry PiのようなSBCが担当する世界です。
PicoはOSを載せて日常作業をする機械ではありません。
Linuxサーバ用途も同様です。
Webサーバ、データベース、Docker、常時稼働の汎用ネットワーク機器といった役割は、そもそもの設計思想が違います。
Picoの264 KB RAMと2 MBフラッシュは、制御プログラムを単体で動かすには十分でも、Linuxを前提にしたソフトウェア資産を抱えるには土台が足りません。
ここで無理に比較するより、「センサーを読んで即座に動く制御板」と捉えたほうが、向き不向きがはっきり見えます。
映像出力やブラウジング、重い画像処理も不向きです。
もちろん工夫して表示器を動かしたり、簡単なUIを載せたりはできますが、HDMIで高解像度映像を扱うような方向ではありません。
動画再生、Webページ描画、Linux上のGUI操作のような処理は、SBCが得意な領域です。
PicoはI/O制御に強く、汎用コンピューティングには向いていない。
その線引きがはっきりしています。
もうひとつ、初心者が誤解しやすいのが「無線なしモデルでIoTを全部やろうとする」ケースです。
初代Picoは無線を持たないので、クラウド連携やWeb経由の制御を主役にしたいならPico Wのほうが筋がよいです。
逆に、ネット接続が要らないタイマー、計測器、簡易コントローラ、点滅や駆動を確実に回したい用途なら、無線なしのPicoでも十分に成立します。
最初の用途を選ぶチェックポイント
最初の題材は、部品の数より「一段ずつ機能が増えるか」で選ぶと失敗が減ります。
筆者がワークショップで見てきた範囲でも、最初からWi‑Fiと表示器とセンサーをまとめて載せるより、ひとつの入出力から順に積み上げたほうが、つまずいた場所を切り分けやすくなります。
小さなロードマップとしては、まずLED点滅から入り、次にボタン入力を足し、その後でADCによる可変抵抗の読み取りへ進む流れが素直です。
ここまで来ると、「出力」「デジタル入力」「アナログ入力」が一通り触れます。
その次にPWMでLED調光やサーボ制御へ進めば、時間変化を伴う制御の感覚が入ります。
さらに無線まで広げたいなら、Pico WでHTTP通信を試す、という順番がきれいです。
- LEDを点滅させる 2. ボタンでLEDを制御する 3. ADCで可変抵抗やアナログセンサーを読む 4. PWMでLED調光やサーボを動かす 5. Pico WでHTTP通信を試す
この順番が有効なのは、Picoのハード構成と自然に噛み合うからです。
26 GPIOがあるのでLEDやボタンで端子不足になりにくく、3 ADCがあるのでアナログ入力もすぐ試せます。
通信の段階ではI2C/SPI/UARTへ広げられ、少し凝ったI/OはPIOが受け持てます。
つまり、最初の一歩がそのまま次の題材の土台になります。
どの題材から入るか迷ったときは、「結果が目で見えるか」「配線が少ないか」「壊れにくい部品で試せるか」を基準にすると整理しやすくなります。
LEDやボタンは反応が見えやすく、ADCは数値として変化が読め、PWMは動きや明るさとして出ます。
Picoの133 MHzという数字だけを見ると抽象的ですが、こうした順番で触ると、スペックがそのまま体験に変わっていきます。
Pico / H / W / WH / Pico 2の違いと選び方
モデルごとの違い
Raspberry Pi Pico系は、まず「無線があるかないか」、次に「ピンヘッダーが最初から実装されているか」で見ると混乱しません。
土台になる初代PicoはRP2040を載せた基本モデルで、デュアルコア動作の 133 MHz、264 KB RAM、2 MBフラッシュ、26 GPIO、3 ADC、PIO、I2C/SPI/UART、入力電圧 1.8〜5.5V という構成です。
LED、ボタン、センサー、サーボ、シリアル通信といった入門題材を広くカバーできる、いわば基準機になります。
ここに無線を足したのがPico Wです。
無線機能は 2.4GHz 802.11n Wi‑Fi と Bluetooth 5.2 に対応していて、センサー値をネットワークへ送る、Web APIをたたく、BLEでスマホとやり取りするといった方向へ一気に広がります。
いっぽうで、Bluetoothはハードウェアとしては対応していても、実際にどこまで使えるかは公開時点のソフトウェア対応状況を見ておく前提になります。
とくに古い解説を読むと、Pico W発売初期の「Wi‑Fi中心」の情報が残っていることがあるので、記事をまたいで読むときは時期の差を意識すると整理しやすくなります。
ヘッダーの有無も、最初の1枚では見逃せない判断材料になります。
Pico HはPicoにピンヘッダーを実装した版、Pico WHはPico Wにピンヘッダーを実装した版です。
性能の芯は同じでも、ブレッドボードへ挿してすぐ配線に入れるという差があり、初心者にはこの差が想像以上に効きます。
筆者が講習で見ていると、ヘッダー未実装モデルは最初のはんだ付けで手が止まりやすく、そこで予定の半分近くを使ってしまうことがあります。
最初の学習ではHやWHの時短効果が大きく、配線とプログラムに意識を向けやすくなります。
将来性まで含めて見ると、Pico 2系は別枠で考える価値があります。
通り、Pico 2はRP2350を搭載し、初代より上位の立ち位置です。
メモリは SRAM 520 KB、フラッシュは 4 MB へ増えていて、プログラムが少し重くなる案件や、通信・表示・複数タスクを組み合わせる工作では余裕が出ます。
最初はLチカやセンサー読み取りから入るとしても、あとで機能を足していきたい人にはPico 2が素直です。
価格も選び方の軸になります。
発売時参考価格はPicoが $4、Pico Wが $6、Pico 2が $5、Pico 2 Wが $7 です。
初代とPico 2の差は1ドルなので、無線が不要でも、少し先の拡張まで見越すならPico 2に寄せる考え方は十分あります。
国内の実売は流通で動くので、この章では発売時参考価格を基準に見ておくのが筋です。
比較表: Pico初代 vs Pico 2

初代PicoとPico 2の差は、見た目より中身にあります。
どちらも小型のマイコンボードですが、後から機能を盛っていく前提なら、メモリとフラッシュの余裕がじわじわ効いてきます。
| 項目 | Raspberry Pi Pico初代 | Raspberry Pi Pico 2 |
|---|---|---|
| 搭載MCU | RP2040 | RP2350 |
| CPU | デュアルコア Arm Cortex-M0+ / 133 MHz | 上位性能の強化版アーキテクチャ |
| RAM | 264 KB | 520 KB |
| フラッシュ | 2 MB | 4 MB |
| GPIO | 26 GPIO | — |
| ADC | 3 ADC | — |
| PIO | あり | — |
| 主な通信 | I2C/SPI/UART | — |
| 入力電圧 | 1.8〜5.5V | — |
| 無線 | なし | なし(Pico 2 Wはあり) |
| 発売時参考価格 | $4 | $5 |
表の見どころは、初代の基本仕様がすでに入門用として十分に整っていることと、Pico 2がその土台を保ったまま余力を増やしていることです。
初代Picoでも、26 GPIO、3 ADC、PIO、I2C/SPI/UART が揃っているので、電子工作の学習範囲は広く取れます。
いっぽうでPico 2は、プログラムが育ってきたときの窮屈さを和らげる方向に効きます。
表示器、通信、センサ処理を同時に走らせるような場面では、スペック表の数字以上に差が出ます。
ℹ️ Note
初代Picoは「まず1枚触ってみる」ための基準機として今も価値があります。Pico 2は「入門からそのまま先へ伸ばす」ための基準機、と捉えると位置づけがはっきりします。
モデル別・こういう人におすすめ
Picoは、とにかく安く始めたい人に向きます。
無線がいらず、LED、ボタン、ブザー、モーター、I2Cセンサーといった王道の題材を順に触るなら、この1枚で不足は出にくい設計です。
RP2040の 133 MHz、264 KB RAM、2 MBフラッシュ が土台になり、26 GPIO と 3 ADC があるので、配線の自由度も確保できます。
ネット接続を使わない制御中心の工作なら、いまでも選ぶ理由があります。
Pico Hは、初学者の最初の1枚として最も無難です。
ブレッドボードへそのまま挿せるので、開封後すぐに配線へ進めます。
筆者の経験では、入門講座でつまずく場所の多くはコードより前、つまり「物理的にどうつなぐか」です。
ヘッダー実装済みだと、この最初の山を越えるのが早く、LED点滅やボタン入力まで一気に進めます。
はんだ付け自体を学ぶ回ではないなら、Hを選ぶ意味ははっきりしています。
Pico Wは、IoT入門を考えている人向けです。
2.4GHz 802.11n Wi‑Fi があることで、センサーデータ送信や簡単なWeb連携にすぐ入れます。
Bluetooth 5.2対応のハードも載っているので、BLE案件へ広げる余地もあります。
無線機能つきで発売時参考価格が $6 という点も魅力で、ネットワーク題材まで視野に入っているなら最初からこちらを選ぶ筋があります。
Pico WHは、Pico Wの無線とHの手離れのよさを両立したモデルです。
Wi‑Fiを触りたい、でもはんだ付けで導入が止まるのは避けたい、という人に合います。
ワークショップでも、この系統は配線に入るまでのロスが少なく、短時間で「通信が通った」という成功体験まで届きやすい印象があります。
Pico 2は、将来性を優先したい人向けです。
学習の出発点は初代と同じでも、520 KB SRAM と 4 MBフラッシュ の余裕があるので、途中で題材が少し重くなっても受け止めやすいのが利点です。
価格差も発売時参考価格で $1 に収まるため、無線なしで長く使う前提なら有力です。
初代を「最低限」ではなく「完成された基本形」と見ることはできますが、これから買う1枚としてはPico 2が伸びしろを持っています。
Pico 2 Wは、無線も将来性も両方ほしい人に向く選択肢です。
発売時参考価格は $7 で、シリーズの中ではいちばん守備範囲が広い立ち位置になります。
学習段階ではオーバースペックに見えても、あとで通信、センサー、表示、制御をまとめる方向へ進むなら、この余裕が効いてきます。
選び方をひとことで整えるなら、最初の学習ならPico HかPico WH、IoTを主役にするならPico WかPico WH、長く使う前提ならPico 2かPico 2 W、価格優先で制御を学ぶなら初代Picoです。
軸を「無線」「ヘッダー」「将来の拡張」の3つに分けると、迷い方そのものが小さくなります。
最初の開発環境はどれを選ぶ?MicroPython・C/C++・Arduino IDE
開発環境は3通りありますが、最初の1本を選ぶ基準ははっきりしています。
完全な初心者ならThonny+MicroPython、速度やタイミングの詰めが主題なら公式のC/C++ SDK、すでにArduinoのスケッチやライブラリ資産が手元にあるならArduino IDEかPlatformIOです。
ここが。
どれが上位という話ではなく、何を最短で体験したいかで選ぶと迷いません。
筆者はワークショップでも、まずMicroPythonでLEDやセンサーを動かし、そのあと同じ題材をC/C++で組み直す流れをよく使います。
最初に動くものを早く作ると、配線ミスなのかコードの考え方なのかを切り分けやすくなりますし、次にC/C++へ移ったときは「何を速くしたいのか」「どこを細かく制御したいのか」が見えた状態で入れます。
この順番だと、理解の定着と仕上がりの両方が伸びます。
まず全体像を1画面で比べると、選び方は次のように整理できます。
| 開発環境 | 向いている人 | 導入の入口 | 強み | 向かない場面 |
|---|---|---|---|---|
| MicroPython+Thonny | 完全初心者、まずLチカから始めたい人 | Thonnyを入れてMicroPythonを書き込む | REPLでその場で試せる、センサー入門まで流れが途切れにくい | 処理速度やメモリ効率を詰める用途 |
| C/C++ SDK | 制御・性能重視、組み込み開発に寄せたい人 | 公式SDK、ツールチェーン、CMakeを整える | 低レベル制御、最適化、公式サンプルが豊富 | 最初の一歩を軽く済ませたい場面 |
| Arduino IDE/PlatformIO | Arduino経験者、既存ライブラリを活かしたい人 | ボードパッケージを入れてサンプルを試す | スケッチ文化をそのまま持ち込める、移植が速い | コア選択や設定を理解しないまま始める場面 |
MicroPython + Thonny
最初の開発環境としては、この組み合わせが最短です。
ThonnyはMicroPython向けの導入が軽く、エディタ、シェル、書き込み補助が1つにまとまっています。
Getting started with Raspberry Pi Pico PDFでも、最初の流れはこの組み合わせを軸に説明されています。
Raspberry Pi Picoシリーズ公式ドキュメントでも、BOOTSELを押しながら接続してRPI-RP2を出し、UF2を書き込む流れが案内されています。
導入はシンプルです。
PCにThonnyを入れ、ボードをBOOTSELを押しながらUSB接続し、RPI-RP2が見えたらMicroPythonのUF2を書き込みます。
その後はThonnyのインタプリタでMicroPython(Raspberry Pi Pico)を選ぶと、シェルにREPLが開きます。
ここで print("hello") やLED点滅の数行を流すだけで、コードを書いて実行する感覚がすぐつかめます。
初心者にとって効くのはこの即時性です。
保存、ビルド、書き込みの段取りをまだ覚えていない段階でも、1行ずつ反応を見ながら進められます。
Lチカからセンサー入門までの流れも自然です。
GPIOの出力、ボタン入力、I2Cセンサーの読み出しまで、短いコードで形になります。
受講者を見ていると、最初は「コードを書く」より「動いた理由がわかる」ことのほうが前進につながります。
REPLでピンの値を読んだり、センサー値をその場で表示したりできるMicroPythonは、この段階の学習テンポと相性が合っています。
一方で、向かない場面もあります。
モーター制御の周期をきっちり詰めたい、通信や表示を重ねた状態で処理の余力を確保したい、PIOや割り込みを含めて挙動を細かく追い込みたい、という段階ではC/C++のほうが主役になります。
つまりMicroPythonは入門用というより、学習の見通しを立てるための最短ルートとして強い、という捉え方が合っています。
⚠️ Warning
PicoとPico Wでは内蔵LEDの扱いが同じではありません。MicroPythonではサンプルを読むときに GP25 固定で考えるより、ボードに合わせたLED指定を見るほうがつまずきません。
C/C++ SDK
速度、サイズ、厳密な制御を優先するなら、公式のC/C++ SDKが本命です。
Pico C/C++ SDK公式ドキュメントの位置づけは明快で、低レベルの制御を正面から扱うための標準ルートになっています。
pico-examplesも充実していて、GPIO、PWM、I2C、SPI、UART、PIOまで、題材ごとに実装の出発点があります。
導入では、CMakeとコンパイラを含むツールチェーンを整え、SDKとサンプル群を配置してビルドする流れになります。
ここはMicroPythonより明らかに学習コストがあります。
ファイルを保存してすぐ試すというより、プロジェクト構造、ビルド、書き込み、デバッグの一連を理解しながら進める形です。
ただ、そのぶん「何がどこで決まっているか」が見えます。
組み込み開発の基本動作に早い段階で触れられる点は、C/C++ SDKならではです。
この環境が効くのは、処理の都合をきちんと設計したい場面です。
たとえばPIOを使った信号生成や、タイミングの揺れを抑えたい制御、RAMやフラッシュ使用量を意識した実装では、MicroPythonよりC/C++のほうが筋が通ります。
NeoPixelのように単線で厳密なタイミングが欲しい題材でも、PIOサンプルを土台にすると構造を理解しながら組めます。
向き不向きを一言で整理すると、C/C++ SDKは「作れるものの上限を先に見たい人」には向きますが、「まず1時間で達成感を得たい人」には遠回りになりがちです。
経験的には、最初の1題材をいきなりC/C++で始めるより、MicroPythonで挙動を確認したあとに移るほうが失敗の理由が減ります。
LED点滅やセンサー読取りを一度済ませておくと、C/C++へ来たときに配線や仕様の理解が前提として揃っているからです。
Arduino IDE/PlatformIO
Arduinoを触ってきた人には、この選択肢が最も自然です。setup() と loop() の流れ、ライブラリの入れ方、サンプルスケッチの読み方に慣れているなら、Picoへ移るときの心理的な段差が小さくなります。
すでに持っているコード資産を活かしやすい点も大きな利点です。
導入では、Arduino IDEにRP2040向けボードパッケージを追加し、対象ボードを選んでサンプルを書き込みます。
コミュニティコアとして広く使われているRaspberry Pi Pico / RP2040系のボードパッケージを入れる流れが一般的です。
PlatformIOを使う場合は、プロジェクト管理やライブラリ管理まで含めて整理された形で進められるので、複数ボードをまたぐ開発とも相性が合います。
この環境の魅力は、既存のArduinoライブラリやサンプルを入口にできることです。
I2Cセンサー、OLED、サーボ、各種モジュールの題材なら、「まず見本を動かす」までが短く済みます。
筆者もArduino経験者には、いきなり全文化を切り替えるより、まず慣れた文法でPicoを触ってもらうことがあります。
そのほうがボード固有の理解に集中できるからです。
反対に、初心者がこの環境で迷うポイントもあります。
ボード名の選択、コアの違い、サンプルがどの前提で書かれているかを意識しないまま進めると、「書き込めない」「LEDの指定が合わない」といった詰まり方をします。
Arduino IDE自体が難しいのではなく、Arduino Uno向けの感覚をそのまま当てはめるとズレが出る、ということです。
Arduino資産がある人には強い入口ですが、完全初心者にとってはThonnyの一体感のほうが一歩目の迷いが少なく収まります。
環境選びのポイント

Raspberry Pi Picoの始め方
Raspberry Pi Picoを触り始める段階では、まず「この小さな基板で何ができるか」を頭の中で具体化しておくと進みが早くなります。
初代PicoはRP2040を載せ、最大 133 MHz で動くデュアルコアのArm Cortex-M0+、264 KB RAM、2 MBフラッシュを備えています。
外に出せる端子は 26 GPIO、アナログ入力は 3 ADC、通信は I2C/SPI/UART を押さえていて、さらに独自機能の PIO があるので、単なるLED点滅だけでなく、センサー読取り、ディスプレイ表示、モーター制御、タイミングの厳しい信号生成まで段階的に広げていけます。
電源まわりも 入力電圧1.8〜5.5V と扱いやすく、USB給電で試し始めてから外部電源へ展開しやすい構成です。
最初にそろえるものも多くはありません。
はんだ付けを避けてすぐ配線に入りたいならPico HまたはPico WH、USBデータ対応ケーブル、ブレッドボード、ジャンパワイヤ、330Ω抵抗、LEDがあれば最初の題材まで進めます。
現場でいちばん多い失敗は充電専用USBケーブルで、見た目では判別しにくいぶん厄介です。
筆者はワークショップでも、データ対応ケーブルを1本だけPico用としてラベルを貼って分けています。
これだけで「ボードが壊れたと思ったらケーブルだった」という再発がぐっと減ります。
BOOTSELとUF2書き込み手順
Picoの最初の書き込みは、USBメモリにファイルを入れる感覚に近いです。
公式のGetting started with Raspberry Pi Pico PDFでも案内されている通り、基板上の BOOTSELボタンを押したまま USBケーブルでPCへ接続すると、PC側に RPI-RP2 というUSBドライブが現れます。
そこでボタンを離します。
対象ボード用の UF2 ファイルをそのドライブへコピーします。
すると書き込み後に自動で再起動し、MicroPythonなどのファームウェアが立ち上がります。
この流れはRaspberry Pi公式のGetting started with Raspberry Pi Pico PDFとRaspberry Pi Picoシリーズ公式ドキュメントに沿ったものです。
ここでのポイントは、ボード名に合ったUF2を選ぶことです。
PicoとPico Wでは使うファイルが分かれていて、たとえばMicroPythonでも rp2-pico 系と rp2-pico-w 系で別配布になっています。
書き込み自体は数秒から十数秒で終わることが多く、うまくいけばRPI-RP2のドライブは役目を終えて消え、通常の実行モードに切り替わります。
もしRPI-RP2が出てこないときは、基板より先にUSBケーブルを疑うと切り分けが速いです。
講座の現場では、受講者が持参したケーブルの何本かが充電専用で、PCからは電源だけ供給されてデータ通信が始まらないことがよくあります。
BOOTSELを押しながら差しても反応がなければ、別のデータ対応ケーブルに替えるだけでそのまま進む場面を何度も見ています。
Thonny設定とREPL

ファームウェアを書き込んだあとは、ThonnyでMicroPython(Raspberry Pi Pico / Pico W向け)を選ぶと、最初の一歩が揃います。
右下のインタプリタ設定で対象をRaspberry Pi Pico系に切り替え、必要なら「Install or update MicroPython」の機能でボードへファームを転送します。
手動でUF2を書いたあとでも、そのままThonnyから接続して操作できます。
この環境のよさは、エディタとシェルが一体になっていることです。
接続に成功すると下部の REPL に >>> が出るので、たとえば短い式を入力して応答が返るだけでも、PCとPicoの通信、ファームの起動、シリアル接続の3つを一度に確認できます。
筆者はこの時点で長いコードを書かず、まずREPLに1行だけ打って反応を見るようにしています。
LEDがまだ光らなくても、REPLが返るなら土台はできています。
前のセクションでも触れた通り、入門段階ではMicroPythonの軽さが効きます。
RP2040の 26 GPIO、3 ADC、I2C/SPI/UART といった機能を、REPLから少しずつ触っていけるからです。
GPIOを出力にしてLEDを点ける、ADCで可変抵抗の値を読む、I2Cでセンサーの応答を確かめる、という流れが1つの画面の中でつながります。
PIOのようなPicoらしい機能は後から深掘りできますが、最初はREPLで「入力した命令が即座に基板の動きになる」体験をつかむほうが、道具としての感覚が早く育ちます。
ℹ️ Note
Thonnyで接続できないときに、コードより先に見るべきなのはインタプリタ設定とUSBケーブルです。プログラムの誤りを疑う前に、右下がMicroPython(Raspberry Pi Pico)系になっているかを見直すだけで詰まり方が変わります。
最初のLチカ
最初の題材は、やはりLチカがちょうどいいです。
理由は単純で、成功と失敗が目でわかるからです。
Picoでは基板内蔵LEDが GP25 につながっているので、外付け部品なしでもGPIO出力の基本を確かめられます。
たとえばMicroPythonなら次のコードで点滅できます。
from machine import Pin
from time import sleep
# 初代Picoの内蔵LEDはGP25に接続されています
led = Pin(25, Pin.OUT)
while True:
led.toggle()
sleep(0.5)この1本で、書き込み、実行、GPIO制御、時間待ちの4点が一気につながります。
LEDが0.5秒ごとに点滅すれば、少なくともボードは動き、実行環境も立ち上がっていて、GPIO出力も機能しています。
Picoの最初の達成感として扱いやすい題材なのは、こうした確認項目がきれいに重なるからです。
Pico Wではここが少し違います。
内蔵LEDはPicoのようにGP25直結ではなく、無線モジュール経由の扱いになるため、Pin(25, ...) の発想をそのまま当てると止まりやすいのが利点です。
MicroPythonでは "LED" という名前で扱う書き方が定番で、次のようにしておくとボード差をまたぎやすくなります。
from machine import Pin
from time import sleep
# Pico W の内蔵LEDは無線モジュール経由の扱いになることがあるため、
# MicroPythonでは抽象名 "LED" で指定するのが互換性が高いです
led = Pin("LED", Pin.OUT)
while True:
led.toggle()
sleep(0.5)ここが。
Picoでは GP25 という具体的な番号を覚えると理解が進みますが、Pico Wでは「内蔵LEDは無線モジュール側」という違いまで含めて捉えると、サンプルコードの読み違いが減ります。
Lチカは単なる儀式ではなく、ボードごとの差を最初に体で覚える練習にもなります。
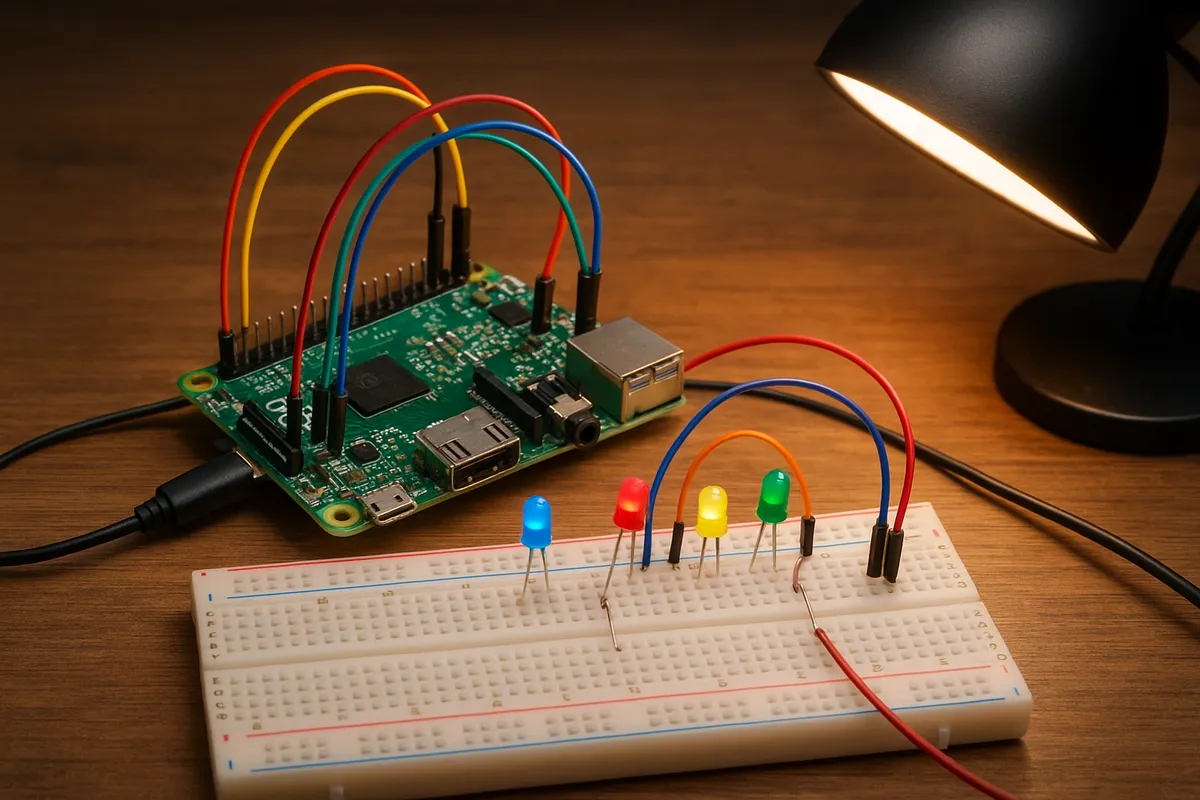
内蔵LEDで動作確認ができたら、ブレッドボードに外付けLEDと 330Ω抵抗 を載せて、任意のGPIOへ広げる流れが自然です。
そうすると「内蔵LED専用の例」から一歩進んで、26 GPIO のどれを出力にしても同じ考え方で扱えることが見えてきます。
そこから先は、LEDをセンサーに置き換えれば入力、I2Cデバイスに置き換えれば通信、PIOを使えばタイミング制御へつながります。
最初のLチカは小さな題材ですが、RP2040の入口としては中身の濃い一歩です。
よくある疑問とつまずきポイント
動かないときのチェックリスト
最初に詰まりやすいのは、コードそのものより接続まわりです。
とくにThonnyがつながらない、あるいはBOOTSELを押してつないでもRPI-RP2が出ないときは、順番を決めて切り分けると迷走しません。
講習の現場でも「RPI-RP2が出ない」という相談は多いです。
半分以上はUSBケーブルが原因でした。
見た目は同じでも給電専用ケーブルだとデータ線が入っていないため、PCからはボードが見えません。
次に多いのは、PC側で自動マウントされない設定や挙動です。
Raspberry PiのGetting started with Raspberry Pi Pico PDFにある通り、まずはBOOTSELを押したままUSB接続し、RPI-RP2として現れるかを見るのが出発点です。
そのうえで、確認箇所は次の順番に並べると整理できます。
- BOOTSELを押しながら接続しているか確認する。
- USBケーブルが充電専用ではなくデータ転送対応か確認する。
- 別のUSBポートでも同じか確認する。
- PC上でRPI-RP2がドライブやボリュームとして見えているか確認する。
- Thonny右下のインタプリタがMicroPython(Raspberry Pi Pico)系になっているか確認する。
- Thonnyで選んでいるポートが別の機器になっていないか
ここが。
Thonnyが接続できないとき、いきなりサンプルコードを書き換える必要はほとんどありません。
RPI-RP2が出ない段階なら、まだプログラム以前の話ですし、RPI-RP2は見えるのにThonnyだけつながらないなら、今度はインタプリタやポート設定を見る、というように層を分けて考えると原因が絞れます。
LEDとボード選択の落とし穴
Pico系で初心者が混乱しやすいのは、名前が似ているのに中身の前提が少しずつ違うことです。
代表例がボード選択です。
MicroPythonのUF2でもArduino IDEのボード設定でも、Pico用とPico W用を取り違えると、書き込みはできたように見えても期待した挙動になりません。
MicroPythonの配布ページでも rp2-pico と rp2-pico-w が分かれているように、対象ボードに合ったものを選ぶ必要があります。
Arduino IDEでもRaspberry Pi Pico / RP2040系のボードパッケージを入れたあと、ボード名とポートを別のものにしていると、その時点で話がずれます。
LEDのサンプルで止まる人が多いのも、この違いが背景にあります。
前のセクションで触れた通り、初代Picoの内蔵LEDはGP25ですが、Pico Wでは同じ感覚で Pin(25) を叩いても反応しないことがあります。
Pico Wは内蔵LEDが無線モジュール側の扱いになっているためで、MicroPythonでは Pin("LED", Pin.OUT) のように抽象名で書くほうが筋が通ります。
PicoのLチカ記事をそのままPico Wへ持っていくと光らない、というのは典型的なつまずきです。
⚠️ Warning
LEDが光らないときは「配線ミス」だけでなく、「そのコードはどのボード向けか」を先に疑うと、遠回りを避けられます。
仕様の読み違いでもう一つ出やすいのがADCです。
Pico系にはADC機能がありますが、外から使える入力本数をそのまま多く見積もると混乱します。
入門記事では「ADCがある」とだけ書かれていることが多いものの、外部入力として扱うのは3本という前提で考えたほうが実作業に合います。
可変抵抗やアナログセンサーを複数つなぐ場面で「まだ余っているはず」と思って手が止まるのは、この数え方の勘違いが原因です。
電源まわりも同様で、ボードに入れられる電圧の話と、GPIOやADCでそのまま受けられる電圧の話を混ぜると危険です。
ADCは0〜3.3Vを12ビットで読む仕組みなので、5V系のアナログ出力をそのまま入れる前提では考えません。
配線・はんだ付けでの注意点
動作確認が終わって外付けLEDやセンサーに進むと、今度は物理的な接続で止まりやすくなります。
とくに見落とされやすいのが、ヘッダー未実装モデルの存在です。
PicoやPico Wには、あらかじめピンヘッダーが付いていない個体があります。
この状態だとブレッドボードへそのまま挿せないので、ジャンパーワイヤで手軽に配線する流れに乗れません。
入門用途では、最初からヘッダー付きのPico HやPico WHのほうが作業が止まりにくいのはこのためです。
未実装モデルにはんだ付けする場合、ありがちな失敗は「とりあえず付けばよい」で進めてしまうことです。
ピンが斜めのまま固まるとブレッドボードに差し込みにくくなりますし、隣のランドに半田が流れると短絡の原因になります。
筆者はワークショップでも、先にブレッドボードへヘッダーを仮固定し、その上に基板を載せてからはんだ付けする手順を勧めています。
こうするとピンの間隔と垂直が自然に揃い、あとで配線がねじれにくくなります。
配線そのものでは、電源ラインの取り回しを軽く見ないことが欠かせません。
LED1個のLチカなら多少ラフでも動きますが、センサーや外部モジュールを増やすと、3.3VとGNDの取り違え、信号線の差し間違い、GND共通の抜けがすぐ不具合になります。
とくにPicoはUSBから電源を取れるぶん、「点いたから合っている」と思い込みやすいのですが、たまたま別経路で給電されているだけのこともあります。
動かないときにコードを見直しても進まない場合、配線を1本ずつ指で追い、どのピンが3.3VでどれがGNDかを基板の印字と照らして確認すると、意外なほどあっさり原因が見つかります。
次に作るならこれ
ステップアップ課題
最初の一歩として定番なのは、Lチカを「入力つき」に変えることです。
LEDをただ点滅させるだけで終わらせず、ボタンを押したら常時点灯、もう一度押したら点滅へ戻す、といった切り替えを入れると、出力と入力がひとつの回路でつながります。
ここで詰まりやすいのがプルアップの考え方です。
Raspberry Piの公式ガイドでも最初の制御例は段階的に進みますが、ボタン入力では内部プルアップを使うか、外部抵抗でプルアップするかで配線の見え方が変わります。
内部プルアップは部品点数が減るので試作向きで、外部プルアップは回路図を読む練習になります。
ワークショップでも、この差が腹落ちした受講者は配線ミスの切り分けが一段早くなります。
次に触れたいのがADCです。
可変抵抗をつないでつまみを回し、値の変化をそのままLEDの点滅間隔や明るさに反映すると、アナログ入力の感覚がつかめます。
PicoのADCは0〜3.3Vを0〜4095として読む12ビットなので、たとえば読み取った値をそのまま画面に表示するだけでなく、0〜100の割合に変換したり、PWMの値へ割り当てたりすると「センサー値を制御量に変える」流れが見えてきます。
ここが。
可変抵抗は理屈どおりに動く教材ですが、実際には値が少し揺れます。
筆者は平均を取る、数回読んで中央値に寄せる、変化が小さいときは更新しない、といった簡単なノイズ対策を早めに入れるほうが、その先のセンサー工作で迷いません。
PWMまで進むと、同じLEDでも見える景色が変わります。
Lチカではオンとオフだけでしたが、PWMではデューティ比で明るさを変えられます。
デューティをゆっくり増減させるフェードは入門課題として手応えがあり、周波数を変えると見え方や用途が変わることも体感できます。
LEDの調光で感覚をつかんだら、その次はサーボ制御です。
サーボはデューティと周波数の設定がそのまま角度の安定に響くので、PWMを「ただ出せる」から「目的に合わせて調整できる」段階へ引き上げてくれます。
ℹ️ Note
Lチカの次に迷ったら、ボタン入力、ADCで可変抵抗、PWMの順に進むと、デジタル入力・アナログ入力・時間制御が自然につながります。
IoTミニプロジェクト
Pico Wを持っているなら、次の題材として温度送信のミニIoTが扱いやすい題材です。
たとえば温度センサーの値を読んで、同じネットワーク内の受け側へHTTP POSTで送るだけでも、「センサーを読む」「Wi‑Fiにつなぐ」「データを外へ出す」という3つが一度に経験できます。
Pico WはWi‑Fiを載せた入門向けボードとしてまとまりがよく、価格もRaspberry Pi製品ページでは6ドルです。
部品点数を増やしすぎずにネットワークまで届くので、机の上の工作が一気に“システム”らしくなります。
筆者の経験では、この温度送信のミニIoTは、動いた瞬間の手応えと、その先に足せる機能の想像が両方得られる題材です。
温度が1回送れただけでも達成感がありますし、そこからログ保存、しきい値を超えたら通知、複数の部屋を見比べる、といった応用に自然につながります。
継続学習の起点として好評なのは、この「まず動く」「次も見える」が同時に入っているからです。
送るだけでなく、簡単なHTTPサーバをPico W側に立てる方向もあります。
ブラウザでIPアドレスにアクセスして、温度やLEDの状態を表示するだけでも立派なIoT課題です。
ボタンを押してLEDを切り替えるページにすると、WebとGPIOがつながる感覚がつかめます。
この種のサーバはローカルネットワーク限定で組むと理解しやすく、無理に外部公開まで広げないほうが学習の軸がぶれません。
MicroPythonの導入自体はMicroPythonの配布ページとThonnyの組み合わせで軽く始められるので、通信まわりの実験に時間を回せます。
さらに学ぶ
中級者向けの寄り道として面白いのがPIOです。
RP2040にはPIOがあり、CPUに細かいタイミング処理を背負わせずに信号を作れます。
NeoPixelのようなタイミングに敏感なLEDはその代表例で、『AdafruitのNeoPixelガイド』でも800kHz系の信号生成が前提になっています。
こうした信号をPicoで安定して出すとき、PIOの価値が一気に見えてきます。
単に光らせるだけならライブラリで足りますが、PIOのコードを一度読むと「マイコンの中で何が起きているか」がぐっと具体的になります。
PIOは、NeoPixel駆動だけでなく簡易プロトコル生成にも向いています。
少し変わったシリアル信号を試したい、既製ライブラリが薄いデバイスを動かしたい、といった場面で、GPIOをただオンオフするだけでは届かない領域に踏み込めます。
Pico 2はRAMやフラッシュにも余裕が増えていますが、まずはPicoやPico WでPIOの発想をつかむだけでも十分価値があります。
学習を続けるなら、開発環境を変えてみるのも一手です。
最初はMicroPythonとThonnyで回路とコードの往復に集中し、速度や細かな制御を詰めたくなった段階でC/C++ SDKへ移る流れは自然です。
Arduino IDEやPlatformIOに慣れている人なら、既存ライブラリ資産を活かして進める方法もあります。
題材としては、Lチカ、ボタン入力、ADCで可変抵抗、PWM、温度送信、HTTPサーバ、PIOと並べると、どこで次の壁に当たっても一段先の選択肢が見えます。
こういう階段を用意しておくと、1つの成功体験で終わらず、次の実験台に手が伸びます。
The Magic of NeoPixels | Adafruit NeoPixel Überguide | Adafruit Learning System
learn.adafruit.comまとめ:迷ったらこの1台と次のアクション
迷ったら、まず動かす前提でRaspberry Pi Pico H、Wi‑Fiまで早く触りたいならRaspberry Pi Pico WHです。
どちらもヘッダー付きなので、はんだ付けで足止めされず、ブレッドボードに挿してその日のうちに1本目の実験へ入れます。
筆者は、はじめの成功体験こそ継続学習の燃料になると感じています。
遠回りせず、最短構成でLチカから入力、そこからネットワークまで届く流れを作るのが近道です。
環境はThonnyとMicroPythonで始めるのが素直です。
Raspberry Pi公式のGetting Startedガイドでもこの流れが案内されており、導入の軽さが学習の勢いを保ってくれます。
処理速度や細かな制御を詰めたくなった段階で、C/C++やArduino IDEへ広げれば十分です。
購入前には、Pico WのBluetoothがその時点のソフト更新でどこまで使えるかと、国内実売価格を確認しておくとよいでしょう。
参考
- Getting started with Raspberry Pi Pico (公式 PDF)
- Raspberry Pi Pico シリーズ公式ドキュメント
大手メーカーで組込みシステムの開発に15年従事。Arduino・Raspberry Piを活用した自作IoTデバイスの制作実績多数。電子工作の基礎から応用まで、実務経験に基づいた解説を得意とする。
関連記事
ラズパイでレトロゲーム機を自作|RetroPie導入
RetroPieは、Raspberry Pi上で動く無料のレトロゲームOSで、ファミコンからプレステ世代までを1台で遊べるようにする仕組みです。標準で50以上のゲーム機やPCに対応し、Raspberry Pi本体・microSDカード・USB-C電源・HDMIケーブル・コントローラーの5点から始められるので、
Raspberry Pi 5でできること15選と旧機種の性能差
Raspberry Pi 5は、Cortex-A72 1.5GHzからCortex-A76 2.4GHzへ刷新され、Pi 4では「一応動く」止まりだったブラウジングや常用デスクトップを、実用域へ押し上げた世代です。
ラズパイ×人感センサーで照明自動化|リレー配線と安全策
Raspberry Piの GPIO でPIR人感センサー検知→リレー制御を実装する手順を、完成イメージから順に追います。この記事を読めば、低電圧(5V)ランプで安全に検証しつつ、配線と gpiozero の Python コードで実用的な保持時間制御まで試せるようになります。
ラズパイ 自宅サーバー構築|Samba/Nextcloud/VPN
Raspberry Pi 5で自宅サーバーを始めるなら、まずはSambaでLAN内の共有フォルダを作り、外出先からはWireGuard経由で入る構成にすると、最短で実用品になります。